
Historically, robotic development was siloed into independent software boxes: one for vision, one for symbolic reasoning, and one for low-level motor control. This “modular” approach was fundamentally brittle; a failure in the vision box’s ability to recognize a novel object would collapse the entire downstream planning and control pipeline.
As we move into the era of the Sovereign Robotic Infrastructure Network (RIN), we have abandoned these silos for the Vision-Language-Action (VLA) paradigm. For the student, the “So what?” is a matter of emergent capability: by unifying these systems into a single transformer-based model, robots gain the ability to perform “semantic reasoning.” They no longer require pre-programmed instructions for every object. Instead, they use web-scale visual and linguistic intelligence to understand that a “crinkled metal cylinder” is a “soda can” that belongs in a “recycling bin,” even if they have never physically encountered that specific item before.
The Architect’s Perspective: The Paradigm Shift
The Old Way (Modular Pipelines) The New Way (Vision-Language-Action Models)
Brittle Independence: Separate modules for perception and control that fail to communicate nuances. Unified Intelligence: A single end-to-end transformer connecting vision and language directly to action.
Programmed Logic: Robots are limited to tasks explicitly defined by human-coded trajectories. Emergent Reasoning: Robots leverage internet-scale data to solve novel, abstract problems (e.g., “pick up the healthiest snack”).
High Integration Debt: Complex hand-offs between vision APIs and motor controllers create latency. Action-as-Language: Physical movements are treated as “text tokens,” processed by the same brain that handles human speech.
No World Model: Modular systems lack an intuitive sense of physical cause and effect. Integrated Simulation: Actions are verified through a Digital Twin before physical motor execution.
To understand how these machines interact with our world, we must first master the mechanics of how physical fluid motion is converted into a data format the model can “read.”
Action-as-Language: How Robots “Speak” Movement
The core breakthrough of VLA models like DeepMind’s RT-2 is the concept of “Action-as-Language.” Rather than treating motor commands as raw electrical voltages or complex coordinate vectors, the model treats them as discrete tokens in a sentence. This allows the robot to “talk” its way through a physical task.
The Tokenization Recipe
- Discretization of the 8-DoF Action Space: The robot’s potential movements are mapped into an 8-dimensional space: 3 dimensions for translation (X, Y, Z), 3 dimensions for rotation (roll, pitch, yaw), 1 for gripper extension (open/close), and 1 for a terminate command. Each dimension is discretized into 256 “bins,” creating a bridge between continuous physical reality and discrete digital tokens.
- Vocabulary Strategy (Model Specifics): To remain computationally efficient, the robot does not learn a new language. Instead, it “hijacks” existing tokens:
- PaLI-X (55B): Reuses the model’s existing numeric integer tokens (typically the first 1000) to represent the action bins.
- PaLM-E (12B): Overwrites the 256 least-frequent tokens in its vocabulary, re-mapping them to physical joint movements.
- The Output String: In every inference cycle, the robot generates an 8-token “sentence”—for example, 1 128 91 241 5 101 127 217. These tokens are de-tokenized back into continuous numerical vectors that drive the servos.
Architectural Insight: Overwriting an existing vocabulary is a superior teaching method. By reusing a pre-trained “backbone” model, we allow the robot to leverage a pre-existing understanding of logic and spatial relationships, simply re-mapping that logic to the physical joints of the machine.
While this linguistic approach provides massive semantic depth, it introduces a significant trade-off: Inference Latency. Running a 55B parameter model autoregressively produces a control frequency of only 1–3 Hz. Relying on such a slow “thought process” for balance would result in the robot falling over before it finishes its “sentence.”
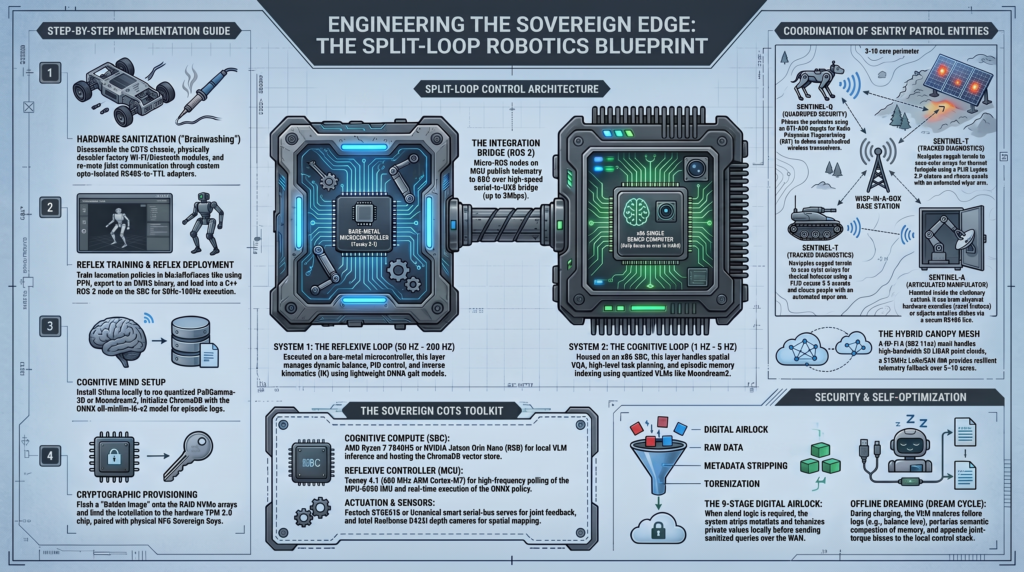
The Split-Loop Brain: System 1 (Reflex) vs. System 2 (Cognition)
To overcome the “Autoregressive Bottleneck,” modern sovereign machines employ a Split-Loop Control architecture, mirroring the biological distinction between the human cerebellum and the prefrontal cortex. This is orchestrated by the OpenClaw framework—the “Second Brain” that manages task delegation.
Between these two loops sits the Digital Twin Engine (powered by MuJoCo or Webots). The Digital Twin acts as a “Predictor-Teacher,” pre-simulating and cryptographically verifying the kinematic paths suggested by System 2 before they are committed to System 1’s physical actuators.
System 1 (Reflexive) vs. System 2 (Cognitive)
Feature System 1 (Reflexive) System 2 (Cognitive)
Biological Analogy Cerebellum (Subconscious) Prefrontal Cortex (Conscious)
Frequency 100 Hz (Locked) 1 Hz – 5 Hz (Variable)
Primary Hardware Teensy 4.1 Microcontroller AMD Ryzen 7 8840HS / Intel i3-N305
Core Task Balance, Gait, PID, IK VQA, Task Planning, Reasoning
Verification Executing ONNX Policy Digital Twin Path-Validation
System 1 provides the “Spherical Resilience” necessary for survival, maintaining a high-speed physical balance loop. System 2 provides the “intelligence,” allowing the OpenClaw layer to formulate high-level goals that System 1 executes.
The architecture’s effectiveness depends entirely on where these loops are housed. For the robot’s “thoughts” to remain secure, the hardware must be isolated from the vulnerabilities of the cloud.
Island Mode: Sovereignty and the Power of the Local Loop
The 2026 OpenClaw Security Crisis proved that cloud-tethered agents are a permanent backdoor into physical assets. In response, we now build for “Island Mode”—a state of absolute computational self-reliance where the machine functions with zero dependency on the public internet.
The Primary Risks of Cloud-Dependency:
- Policy Vulnerability: Remote API changes can instantly freeze a factory floor or modify safety protocols without local consent.
- Latency-induced Instability: Physical systems cannot wait for a high-latency satellite “handshake” to avoid a collision.
- Metadata Leakage: Raw sensor telemetry (coordinates and images) acts as an unprotectable backdoor into your private facility data.
To interact with the outside world, sovereign machines use a 9-stage Digital Airlock protocol. When the robot must query a high-capacity model (like Project Remy), it intercepts the payload, executes Metadata Stripping, and Tokenizes private values into anonymous identifiers. The original context is logged locally to “The Bank” (the secure local ledger), while only a sterilized logic query is sent over the WAN.
This software isolation is meaningless without a corresponding strategy for the physical hardware.
Building the Sovereign Machine: From COTS to “Brainwashed” Hardware
We build our agents using COTS (Common Off-the-Shelf) components, but they must undergo the Sanitization Protocol (or “Brainwashing”) to ensure they do not “phone home” to manufacturers.
The Sovereign “Hardware Guts” Checklist
- [ ] The Brain (System 2): AMD Ryzen 7 7840HS or Intel i3-N305 Mini-PC (stripped from its original chassis).
- [ ] The Reflex Center (System 1): Teensy 4.1 microcontroller running bare-metal C++ ONNX Runtime.
- [ ] The Power Source: LiFePO4 (Lithium Iron Phosphate) batteries, chosen for their chemical stability and safety in extreme conditions.
- [ ] Sanitization: Physical removal (desoldering) of factory Wi-Fi/Bluetooth cards and the installation of opto-isolated RS485 serial buses for joint communication.
Offline Dreaming and Semantic Compaction
Sovereign robots optimize themselves during standby via the “Offline Dreaming” routine. Because a robot’s 2TB storage limit would quickly be exhausted by raw logs, the system performs Semantic Compaction.
It analyzes the day’s episodic logs, identifying and merging redundant data (e.g., merging multiple “path clear” reports into one entry). Crucially, the robot analyzes its own failures—such as a balance slip at 14:32—and automatically appends “torque biases” to its joint controllers. This self-improvement occurs entirely on-device, evolving the robot’s world model without human intervention.
As these decentralized, self-learning agents continue to proliferate, they mark a final shift away from the fragile, centralized silicon minds of the past.
Summary of the VLA Paradigm Shift
The unification of vision, language, and action is not merely a technical upgrade; it is the blueprint for modern physical foundation models. By isolating reflexive stability from cognitive reasoning and enforcing hardware-level sovereignty, we ensure that the “Language of Motion” remains a private conversation between the robot and its environment.
Key Terms Glossary
- VLA (Vision-Language-Action): A unified transformer model that maps visual and linguistic inputs directly to physical motor tokens.
- Discretization: The process of dividing continuous physical space into 256 discrete “bins” for robotic control.
- Island Mode: A state of absolute computational self-reliance, requiring zero internet connectivity for perception or reasoning.
- Locutus Ledger: A decentralized, cryptographic record built on Rust and Wasm that stores immutable “Proof of Labor” logs locally.
- Digital Twin: A local physics simulation (MuJoCo/Webots) used to verify kinematic paths before physical movement.
- OpenClaw: The autonomous agentic orchestration layer that serves as the robot’s “Second Brain” for task delegation.